
Cualquier sistema de control físico sufre inherentemente un error de estado estable en respuesta a ciertos tipos de entradas. Un sistema puede no tener un error de estado estable en una entrada escalón, pero el mismo sistema puede presentar un error de estado estable distinto de cero en una entrada rampa.
Introducción
Los errores en un sistema de control se pueden atribuir a muchos factores. Cambios en la referencia de entrada causarán errores inevitables durante los períodos transitorios y también pueden causar errores de estado estacionario. Las imperfecciones en los componentes del sistema, como la fricción estática, el envejecimiento o el deterioro, provocarán errores en el estado estable. En esta sección, sin embargo, no discutiremos los errores debidos a imperfecciones en los componentes del sistema. Más bien, investigaremos un tipo de error de estado estacionario que es causado por la incapacidad de un sistema para seguir tipos particulares de entradas. Las entradas de prueba comúnmente utilizadas para el análisis y diseño de errores en estado estable se resumen en la Tabla 7.1.

Para explicar cómo se utilizan estas señales de prueba, supongamos un sistema de control de posición, donde la posición de salida sigue a la posición de entrada de comando.
Escalón Unitario. Las entradas de escalón unitario representan una posición constante y, por lo tanto, son útiles para determinar la capacidad del sistema de control para posicionarse con respecto a un objetivo estacionario. Un control de posición para una antena es un ejemplo de un sistema que se puede probar con precisión mediante entradas escalonadas.
Rampa. Las entradas de rampa representan entradas de velocidad constante a un sistema de control de posición, con una amplitud que aumenta linealmente. Estas formas de onda se pueden utilizar para probar la capacidad de un sistema para seguir una entrada (una posición) que aumenta linealmente o, de manera equivalente, para rastrear un objetivo de velocidad constante. Por ejemplo, un sistema de control de posición que rastrea un satélite que se mueve a través del cielo a una velocidad angular constante.
Parábola. Las entradas parabólicas, cuyas segundas derivadas son constantes, representan entradas de aceleración constantes para los sistemas de control de posición y se pueden usar para representar objetivos acelerados, como un misil.
Cualquier sistema de control físico sufre inherentemente un error de estado estable en respuesta a ciertos tipos de entradas. Un sistema puede no tener un error de estado estable en una entrada escalón, pero el mismo sistema puede presentar un error de estado estable distinto de cero en una entrada rampa. (La única forma en que podemos eliminar este error es modificar la estructura del sistema.) El que un sistema determinado muestre un error de estado estable para un tipo dado de entrada depende del tipo de función de transferencia de bucle abierto del sistema.
Cálculo rápido del error en estado estable - Especificaciones.
La finalidad de toda la teoría sobre el error en estado estable es, al fin y al cabo, calcular dicho error o calcular los valores de ciertos parámetros para cumplir con especificaciones tales como «determinar el valor de K para que el error en estado estable sea de 10%». Este documento cumple con la misión de explicar la teoría a partir del siguiente apartado (bastante extensa). Para aquellos que prefieren un resumen e ir directamente al grano, le propongo el siguiente método que le permita hallar el error en estado estable en tres pasos. Luego, le doy un ejemplo.
Antes de aplicar el siguiente método, debe cerciorarse que el sistema sea estable. Lo correcto es hacerlo aplicando el criterio de Routh (para un repaso, ver Estabilidad de un sistema de control). En nuestro ejemplo, para abreviar, aplicaremos el comando Matlab isstable() junto con feedback() para asegurarnos de que el sistema es estable.
1er Paso: Al igual que en el caso de la evaluación de la respuesta transitoria, el primer paso es lograr representar nuestro sistema como uno de realimentación unitaria (es frecuente que en el enunciado de los problemas típicos, ya se suponga de antemano), y asegurarse de que la entrada y la salida tengan las mismas unidades. Es decir, representarlo como un diagrama de bloques con la forma siguiente:


Donde G(s) es la Función de Transferencia Directa de nuestro sistema. En vista de que la realimentación es unitaria, G(s) también es la Función de Transferencia a lazo abierto.
Y es la segunda, la Función de Transferencia a lazo abierto, la que se usa para calcular las siguientes constantes de error. Este hecho será importante tomarlo en cuenta cuando la realimentación sea no unitaria.
2do Paso: Luego, determine el valor de unos factores llamados «Constantes de error» definidos como sigue:
- Constante de posición Kp:

- Constante de velocidad Kv:

- Constante de aceleración Ka:

3er Paso: Una vez calculadas estas constantes podemos calcular el error en estado estable para cada una de las entradas de la Tabla 7.1, mediante las siguientes fórmulas:
- Error en estado estable e(∞) para entrada escalón unitario U(t) (step):

- Error en estado estable e(∞) para entrada rampa unitaria tU(t) (ramp):

- Error en estado estable e(∞) para entrada parábola unitaria (1/2)t^2U(t) (parabola):

Ejemplo - Sistema con realimentación unitaria
Determinar el error en estado estable de cada uno de los sistemas de la Figura 7.7, para entradas escalón unitario, rampa y parábola.

Respuesta para sistema (a)
1. Comprobación de estabilidad.
Para el sistema (a) comprobamos que el sistema es estable mediante el siguiente comando en matlab:
> s=tf(‘s’)
>G=(500*(s+2)*(s+5))/((s+8)*(s+10)*(s+12))
G =
500 s^2 + 3500 s + 5000 / s^3 + 30 s^2 + 296 s + 960
>sys=feedback(G,1)
sys =
500 s^2 + 3500 s + 5000 / s^3 + 530 s^2 + 3796 s + 5960
>isstable(sys)
ans = 1
2. Cálculo de las constantes Kp, Kv y Ka

3. Cálculo del error para entrada escalón, rampa y parábola:

Los errores en estado estable dependen de la forma de G(s) (la presencia o ausencia de integradores y su número) y de la función de entrada que se utiliza como prueba. Para ver el resto del ejercicio, o para ver un segundo ejemplo donde se deben cumplir especificaciones de diseño, ver los siguientes link:
Ejemplo 1 – Error en estado estable de un sistema de control con realimentación unitaria
Ejemplo - Sistema con realimentación no unitaria
En numerosos casos, los sistemas de control no tienen realimentación unitaria. El recorrido de realimentación puede estar constituido por una ganancia diferente de cero, o una función de transferencia específica. Es por ello que debemos considerar el caso de un sistema de control general con realimentación no unitaria, tal como el mostrado en el siguiente ejemplo:

Calcular el error del sistema en régimen permanente ante una entrada escalón unitario y el error en régimen permanente ante una entrada rampa: Ejemplo 2 – Error en estado estable de un sistema de control con realimentación no unitaria
En los siguientes apartados se deducen teóricamente las ecuaciones de error y constantes de error utilizadas anteriormente.
Definición del error en estado estable en función de la configuración del sistema.
Los errores en estado estable de sistemas de control lineales dependen del tipo de la señal de referencia y del tipo de sistema. Antes de emprender el error en estado estable, se debe clarificar cuál es el significado del error del sistema.
El error se puede ver como una señal que rápidamente debe ser reducida a cero, si esto es posible. Consideremos el sistema de la Figura 7-5:


Donde r(t) es la señal de entrada, u(t) es la señal actuante, b(t) es la señal de realimentación y y(t) es la señal de salida. El error e(t) del sistema se puede definir como:

Debemos recordar que r(t) y y(t) no tienen necesariamente las mismas dimensiones. En cambio, cuando el sistema tiene realimentación unitaria, H(s)=1, la entrada r(t) es la señal de referencia y el error es simplemente:

Es decir, el error es la señal actuante , u(t) . Cuando H(s) no es igual a 1, u(t) puede o no ser el error, en función de la forma y propósito de H(s). Por tanto, se debe definir la señal de referencia cuando H(s) no es igual a 1.
El error en estado estable se define como:

Para establecer un estudio sistemático del error en estado estable para sistemas lineales, Clasificaremos los sistemas de control como sigue:
1. Sistemas de realimentación unitaria,
2. Sistemas de realimentación no unitaria.
Error en Estado Estable para Sistemas con Realimentación Unitaria
Considere el sistema de la Figura 5-49
La Función de Transferencia para el lazo cerrado de la figura anterior es:

La Función de Transferencia entre la señal de error e(t) y la señal de entrada r(t) es:

Donde el error e (t) es la diferencia entre la señal de entrada y la señal de salida. El teorema del valor final proporciona una forma conveniente de encontrar el error en estado estable de un sistema:

El error en estado estable es:

Esta última ecuación nos permite calcular el error de estado estable ess, dada la entrada R(s) y la función de transferencia directa G (s). Luego sustituimos varias entradas por R(s) y entonces sacamos conclusiones sobre la relación que existe entre el sistema de bucle abierto G (s) y la naturaleza del error de estado estable ess.
- Entrada Escalón Unitario: Utilizando R(s) =1/s, obtenemos los siguiente:

Donde:

Es la ganancia de la función de transferencia directa. Para tener un error en estado estable igual a cero debemos lograr que:

Para satisfacer esta condición, G(s) debe tener la siguiente forma:

Y para que el límite sea infinito, el denominador debe ser igual a cero, cuando S tiende a cero. Entonces n debe ser n> = 1, es decir, al menos un polo debe estar en el origen, lo que equivale a decir que al menos una integración pura debe estar presente en la ruta directa. La respuesta de estado estacionario para este caso de error de estado estable igual a cero es similar a la mostrada en la Figura 7-2a, output 1.


Si no hay integradores entonces n = 0, y se produce un error constante. Este es el caso que se muestra en la Figura 7-2a, output 2.
En resumen, para una entrada escalón unitario a un sistema de retroalimentación unitaria, el error de estado estacionario será cero si hay al menos una integración pura en la función de transferencia directa.
- Entrada Función Rampa. Utilizamos R(s) =1/Sˆ2, y obtenemos:

Para obtener un error en estado estable para una entrada rampa al sistema de realimentación unitaria, se debe cumplir que:

Para satisfacer esta condición, G (s) debe tomar la forma donde n> = 2. En otras palabras, debe haber al menos dos integraciones en la ruta directa. En la Figura 7.2b, salida 1, se muestra un ejemplo de un error de estado estable para esta entrada en rampa:


Si existe un solo integrador en la ruta directa, entonces lim sG (s) es finita en vez de infinito y esto conduce a un error constante, como se muestra en la figura 7.2b, salida 2. Si solo hay un integrador en la ruta de reenvío, lim sG (s) = 0, y el error de estado estacionario será infinito y dará lugar a una rampa divergente, como se muestra en la figura 7.2b, salida 3.
- Entrada Función Parábola. Utilizamos R(s) =1/Sˆ3, y obtenemos:

Para obtener cero error en estado estable a una entrada parabólica en un sistema de realimentación unitaria, se debe cumplir que:

Para satisfacer esta condición, n debe ser n> = 3. En otras palabras, debe haber al menos tres integraciones en la ruta de acceso. Si solo hay dos integradores en la ruta de reenvío, entonces lim s2G (s) es finita en vez de infinito y esto lleva a un error constante. Si hay uno o cero integradores en la ruta de avance, e (∞) es infinito.
Clasificación de sistemas de control (tipos de sistema) y constantes de error.
Tipo de sistema. El sistema de control se puede clasificar de acuerdo con su capacidad para seguir entradas escalonadas, entradas de rampa o entradas parabólicas, y así sucesivamente. Este es un esquema de clasificación razonable porque la mayoría de las entradas reales se pueden considerar como una combinación de tales entradas. Considere el sistema de control de retroalimentación unitaria con la siguiente función G (s) de transferencia de bucle abierto:
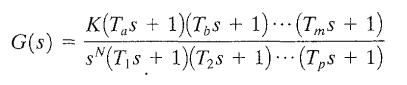
Implica el término S͎ elevado a la N en el denominador, que representa un polo de multiplicidad N en el origen. Un sistema se llama tipo 0, tipo 1, tipo 2, … si N = 0, 1, 2 … respectivamente. A medida que el tipo aumenta, la precisión mejora. Sin embargo, esto agrava el problema de estabilidad. Si G (s) se escribe para que cada término en el numerador y el denominador, excepto el término S elevado a la N, se acerque a la unidad cuando s se acerca a cero, entonces la ganancia de bucle abierto K está directamente relacionada con el error de estado estacionario.
Constante de error estático. Las constantes de error estático definidas a continuación son figuras de mérito de los sistemas de control. Cuanto más altas sean las constantes, menor será el error de estado estacionario.
- La Constante de Error de Posición Kp (error escalón). El error en estado estable de un sistema para una entrada escalón unitario es:

La Constante de Error de Posición Kp está definida por:

Por lo tanto, el error de estado estacionario definido en términos de la constante de error escalón Kp es:

Para el sistema tipo cero:

Para un sistema tipo 1 o mayor:

- La Constante de Error de Velocidad Kv (error rampa). El error en estado estable de un sistema para una entrada rampa unitaria es:
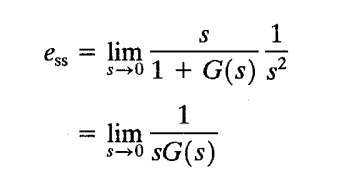
La Constante de Error de Velocidad Kv está definida por:

Por lo tanto, el error de estado estacionario definido en términos de la constante de error rampa Kv es:

Para el sistema tipo cero:

Para un sistema tipo 1:

Para un sistema tipo 2 o mayor:

- La Constante de Error de Aceleración Ka (error parabólico). El error en estado estable de un sistema para una entrada parábola unitaria es:

La Constante de Error de Aceleración Ka está definida por:

Por lo tanto, el error de estado estacionario definido en términos de la constante de error aceleración Ka es:

Para el sistema tipo cero:

Para el sistema tipo 1:

Para el sistema tipo 2:

Para el sistema tipo 3 o mayor:

La Tabla 7.2 vincula los conceptos de error de estado estacionario, constantes de error estático y tipo de sistema. La tabla muestra las constantes de error estático y el error de estado estable como funciones de la forma de onda de entrada y el tipo de sistema.

Otros autores, como Ogata, resumen el tema de la siguiente manera:

Considerando los diagramas de bloque de la Figura anterior, tenemos que:

Error de estado estable para sistemas de realimentación no unitarios.
SIGUIENTE: Error en estado estable para sistemas con realimentación no unitaria
Te puede interesar:
- Ejemplo 2 – Error en estado estable de un sistema de control con realimentación no unitaria
- Estabilidad de un sistema de control
- PID – Acciones básicas de sistemas de control
Fuentes:
- Control Systems Engineering, Nise
- Sistemas de Control Automatico Benjamin C Kuo
- Modern_Control_Engineering, Ogata 4t
Escrito por: Larry Francis Obando – Technical Specialist – Educational Content Writer.
WhatsApp: +34633129287 Atención Inmediata!!
Mentoring Académico / Emprendedores / Empresarial
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, Caracas.
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, Valle de Sartenejas.
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Contacto: España. +34 633129287
Caracas, Valladolid, Quito, Guayaquil, Jaén, Villafranca de Ordizia.
WhatsApp: +34633129287
email: dademuchconnection@gmail.com
Relacionado:
Diagrama de Bloques – Ingeniería de Control
Dinámica de un Sistema Masa-Resorte-Amortiguador
Diagrama de Bloques de Sistema Electromecánico con Motor DC
Respuesta Transitoria de un Sistema de Control

What ?
Me gustaMe gusta